Explaining how to obtain the linear system of equations:
From $P^{\prime}=HP$, we have
$$\begin{bmatrix}u_i\\ v_i\\ 1\end{bmatrix}=\begin{bmatrix}h_1 & h_2 & h_3\\ h_4 & h_5 & h_6\\ h_7 & h_8 & h_9\end{bmatrix}\begin{bmatrix}x_i\\ y_i\\ 1\end{bmatrix}$$
from which we get
$\begin{align}
u_i=h_1x_i+h_2y_i+h_3 & \quad (1)\\
v_i=h_4x_i+h_5y_i+h_6 & \quad (2)\\
1=h_7x_i+h_8y_i+h_9 & \quad (3)\\
\end{align}$
- $(1) / (3)$ and rearranging gives $h_7x_iu_i+h_8y_iu_i+h_9u_i-h_1x_i-h_2y_i-h_3=0$
- $(2) / (3)$ and rearranging gives $h_7x_iv_i+h_8y_iv_i+h_9v_i-h_4x_i-h_5y_i-h_6=0$
Hence, each pair of points $p_i^{\prime} = \begin{bmatrix}u_i\\ v_i\\ 1\end{bmatrix}, p_i = \begin{bmatrix}x_i\\ y_i\\ 1\end{bmatrix}$, we get $2$ equations.
From $4$ pair of points we get linear system with $2\times 4 = 8$ equations, for $8$ unknowns $h_1,h_2,\ldots,h_8$.
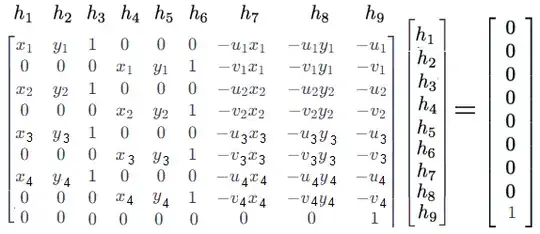
Projective Transform (Homography) having $8$ degrees of freedom, $h_9$ is known or can be obtained from the unknown coefficients, so we have to solve for $8$ unknowns.
If we assume $h_9=1$, then we have the following linear system of equation ($A\boldsymbol{h}=\boldsymbol{b}$) to solve:
If we assume $\sum\limits_{i=1}^{9}h_i=1$, then we have the following linear system of equation
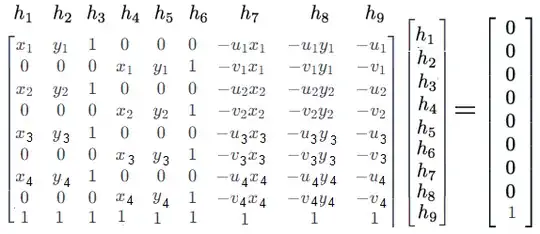
Assuming $A$ is full-rank, the system has a unique solution and can be obtained as $\boldsymbol{h}=A^{-1}\boldsymbol{b}$, or, more generally, as $\boldsymbol{h}=A^{\dagger}\boldsymbol{b}$, using the Moore-Penrose Pseudoinverse.
Now, let's demonstrate with python:
import numpy as np
import matplotlib.pylab as plt
src = np.array([[14,28],
[288,28],
[14,218],
[288,218]])
dst = np.array([[34,207],
[281,130],
[16,29],
[263,25]])
x, y, u, v = src[:,0], src[:,1], dst[:,0], dst[:,1]
A = np.zeros((9,9))
j = 0
for i in range(4):
A[j,:] = np.array([-x[i], -y[i], -1, 0, 0, 0, x[i]u[i], y[i]u[i], u[i]])
A[j+1,:] = np.array([0, 0, 0, -x[i], -y[i], -1, x[i]v[i], y[i]v[i], v[i]])
j += 2
A[8, 8] = 1 # assuming h_9 = 1
b = [0]*8 + [1]
H = np.reshape(np.linalg.solve(A, b), (3,3))
print(H)
[[ 1.68471 , -0.09453488, 14.58392177],
[ 0.05006887, -0.97074686, 242.75163122],
[ 0.00264368, 0.00027783, 1. ]]
ps, p1s = [], []
for i in range(4):
p, q = src[i], dst[i]
p_hom = [p[0], p[1],1]
p1_hom = H@p_hom
p1 = [x / p1_hom[2] for x in p1_hom[:-1]]
ps.append(p)
p1s.append(p1)
print("P:{}, P':{}, H@P:{}".format(p, q, p1))
P:[14 28], P':[ 34 207], H@P:[34.0, 207.00000000000003]
P:[288 28], P':[281 130], H@P:[281.0, 130.0]
P:[ 14 218], P':[16 29], H@P:[16.0, 29.0]
P:[288 218], P':[263 25], H@P:[263.0, 24.999999999999986]
plot the original and transformed points
ps, p1s = np.array(ps), np.array(p1s)
max_y = 300
plt.figure(figsize=(10,3))
plt.subplot(121), plt.scatter(ps[:,0], max_y-ps[:,1], color='g', s=50), plt.title('P', size=20), plt.grid()
plt.subplot(122), plt.scatter(p1s[:,0], max_y-p1s[:,1], color='r', s=50), plt.title(r'P$^{\prime}$', size=20), plt.grid()
plt.show()
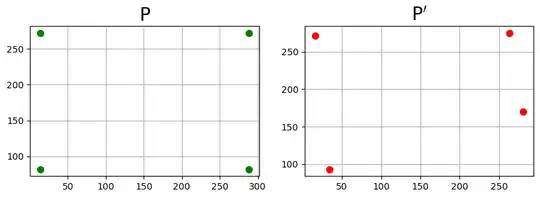
As can be seen, the transformed coordinates are same as the ground-truth ones (upto numerical precision) with the estimated homography matrix.
Reference: https://www.cs.cmu.edu/~16385/lectures/lecture9.pdf