I'm here to ask a really stupid question just to be sure of its answer. My professor gave us an exercise where we have to determine the Lagrangian of a system that is formed by a circular ring of mass $M$ and radius $R$ which is placed in the $(x,z)$ plane. In this plane, it rotates around one of his point $O$ fixed in the origin of the axes. Also, there is a particle $P$ of mass $m$ that moves on this ring-like object without friction.
The Lagrangian has to be written in terms of $\theta$, $\phi$, $\dot{\theta},\dot{\phi}$ where $\theta$ is the angle formed by the segment that connects $O$ with the center $C$ of the ring guide with the $z$ axes and $\phi$ is the angle formed by the segment that connects the position of the particle $P$ with the center of the ring guide $C$ and the $z$ axes.
I have no problem in understanding how to write the Lagrangian itself, but I'm more confused on how the professor wrote the solution for this problem. He stated that the coordinates of the center $C$ of the guide can be written as: $$ \begin{cases} x= R\sin \theta\\ z=-R \cos\theta \end{cases} $$ where I would have written $z = R \sin\left(\frac{\pi}{2}-\theta\right)=R \cos\theta$, hence the position of the point $P$ should be expressed as: $$ \begin{cases} x= R(\sin \theta + \sin\phi)\\ z=R (\cos\theta+\cos \phi) \end{cases} $$ and not as my professor did:
$$ \begin{cases} x= R(\sin \theta + \sin\phi)\\ z=-R (\cos\theta+\cos \phi) \end{cases} $$
I'll add an image of the problem so that it is easier to visualize the system. This is not official, it is how I understood it.
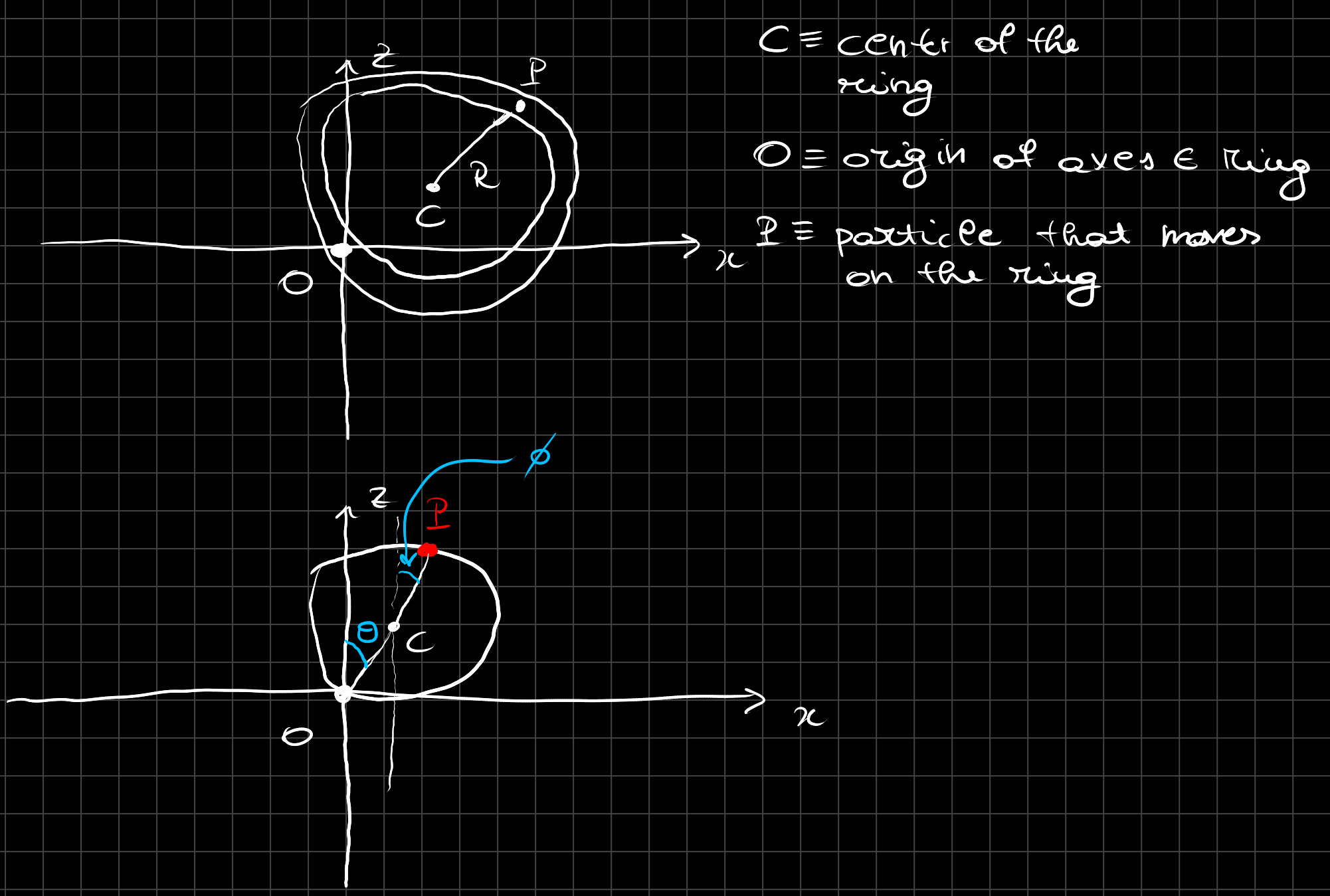 Keep in mind that the ring guide can rotate around the origin $O$, where $O$ is always a point on the guide, so $\theta$ is not fixed.
Keep in mind that the ring guide can rotate around the origin $O$, where $O$ is always a point on the guide, so $\theta$ is not fixed.
Sorry for my really bad drawing ability and thanks a lot in advance for your help!