Relation of Lie derivative to connection
- We do not need connection coefficients to write down the Lie derivative. However, if we have a torsion free connection $(\nabla)$ , we can express the Lie derivative as:
$$ L_V \eta = \nabla_{V} \eta - \nabla_{\eta} V$$
- The Lie bracket can actually be considered as a zero curvature connection with torsion. (in a related sense to the normal connection) for group manifolds
Interpreting the Lie derivative
1. The Lie Bracket interpretation
To understand the Lie derivative, it can be done by understanding an object known as the Lie Bracket of two vector fields:
$$ L_{V} \eta=\left[ V, \eta \right]$$
Now, what is this? The key to understanding it is to think of vector fields as group elements over a manifold as flows pushing the points around by their flows as group actions.
$\hspace{3cm}$ 
Let's suppose we have a function $f$
which maps points in the chart to numbers, now if we flow the points on the manifold as $I+ \epsilon \eta$ where $I$ is the identity, $\epsilon$ is a tiny number and $\eta$ is a vector on the manifold, the function changes it's value to :
$$ (I+ \epsilon \eta) f= f + \epsilon \eta f$$
Now, suppose we were to consecutively flow the points on the manifold by an infinitesimal vector field $\epsilon \chi$, then our function's value would change by :
$$(I+ \epsilon \chi ) (I+ \epsilon \eta) f = \left (I + \epsilon ( \eta + \chi) + \epsilon^2 \chi \eta \right) f$$
Now the $\epsilon$ order term just shows the parellogram law holds even under these flowy situations.
$\hspace{3cm}$
To really reveal the group structure, we must check the commutator:
$$ \left[ x,y \right]= xy x^{-1} y^{-1}$$
We can find:
$$ (I+\epsilon \chi) (I+ \epsilon \eta) ( I + \epsilon \chi)^{-1} (I+ \epsilon \eta )^{-1}= I+ \epsilon^2 ( \chi \eta - \eta \chi)= I+ \epsilon^2 \left[ \chi , \eta \right]$$
These brackets denote the lack of gap closing by the two vector fields :
$\hspace{2cm}$ 
2. The dragging interpretation:
$\hspace{3cm}$ 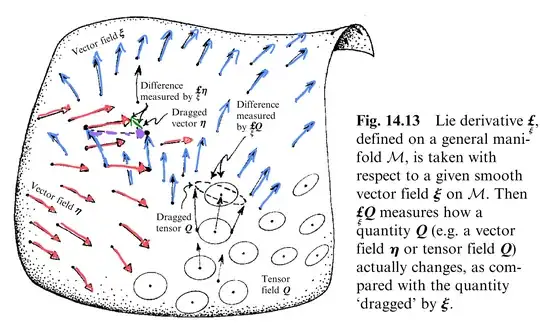
Dragged along is the purple vector, green is the difference.
References: Roger Penrose , Road to Reality, Chapter-13 and 14
3. Short and sweet interpretation for Lie derivative of vector fields
The Lie bracket measures the failure of 'mixed directional derivatives' to commute.
Page-36 of John Baez's Gauge Fields, Knots and Gravity
Utility of the Lie derivative
- To my knowledge for proving certain vector calculus identities using differential forms, the only way to do it using Lie derivative. See here



