I have a little problem finding a solution for this problem:
My position is unknown. I can see a landmark (angle, range) and so I know the position $LM_{local}$ in my local coordinate frame.
I recognized this landmark, and so I also know the global position of this landmark. LM(x,y, $\theta$)
But I have a problem finding my global position.
I only get a correct position at a specific orientation of myself. When I turn myself in place, the calculated position goes in a circle around the landmark...
I think my problem could be, not knowing the orientation of the landmark in my local coordinate system... But I am not sure...
Is this problem solvable with one landmark?
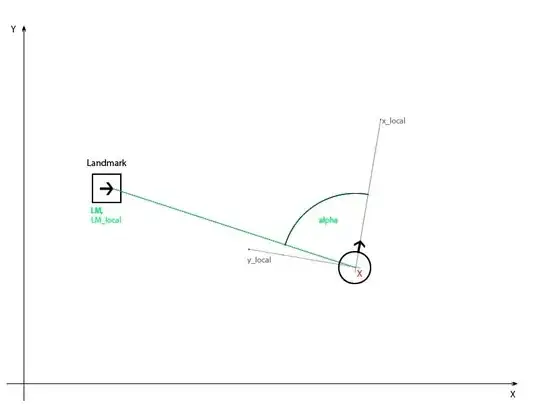
The green elements are known, and the red X is the position to be calculated.