The problem setup involves a known triangle $P_1P_2P_3$ in $\mathbb R^3$ and tetrahedral vertex angles $\theta_1,\theta_2,\theta_3$ we want to form by positioning a fourth point $Q$ "over" the triangle. The goal is to determine a position for that fourth point $Q$.
First note the non-uniqueness of the solution in geometric terms. If $\overline Q$ is the reflection of $Q$ in the plane of triangle $P_1P_2P_3$, then $\overline Q$ will also be a solution whenever $Q$ is. This might not be an impediment for an application in which the point $Q$ is known to be only "above" or "below" the plane of the triangle; an aerial camera flying over a triangle on the ground would exclude possible locations under the ground.
Next we assume the correspondence of angles $\theta_i$ to opposite edges of the triangle is known. Comments above allude to a more complicated situation, in which the correspondence may be heuristically determined by a history of observations. But we attempt to solve the problem when the correspondence is known, merely noting that if the angles $\theta_i$ were to become equal at some point in time, historical continuity of the correspondence could be jeopardized.
Finding lengths of edges
With those caveats given, let's set up a numerical method to find the unknown lengths of the tetrahedral edges. With the correspondence that the rotated and translated image of unit vector $u_i$ should point from $Q$ to $P_i$, we make the following conventions regarding the vertex angles opposing the sides of the triangle. Let $\{i,j,k\}=\{1,2,3\}$; then:
known angle $\angle P_i Q P_j$ is $\theta_k \in (0,\pi)$
known length of edge $P_i P_j$ is $d_k$
unknown length of edge $QP_k$ is $x_k$
The import of this is that the tetrahedral face $P_i Q P_j$ has angle $\theta_k$ opposite the triangle side of length $d_k$. Side lengths $x_i,x_j$ of this triangle are unknowns.
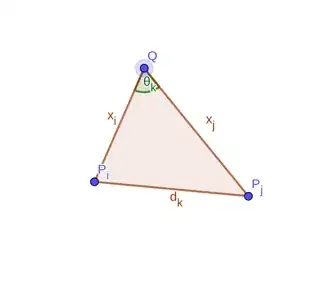
Figure 1: Typical face of tetrahedron with unknown edge lengths (click to enlarge)
As Li Li commented on your closely related Question, the Law of Cosines gives us a system of three quadratic equations for three unknowns $x_1,x_2,x_3$. For simplicity we write $c_k = \cos \theta_k$:
$$ \begin{aligned}
x_1^2 + x_2^2 - d_3^2 &= 2c_3 x_1 x_2 \\
x_1^2 + x_3^2 - d_2^2 &= 2c_2 x_1 x_3 \\
x_2^2 + x_3^2 - d_1^2 &= 2c_1 x_2 x_3
\end{aligned} $$
Collecting all terms on one side, we rewrite this as a polynomial system suitable for numeric solution:
$$ \vec F(x_1,x_2,x_3) := \begin{pmatrix}
x_1^2 - 2c_3 x_1 x_2 + x_2^2 - d_3^2 \\
x_1^2 - 2c_2 x_1 x_3 + x_3^2 - d_2^2 \\
x_2^2 - 2c_1 x_2 x_3 + x_3^2 - d_1^2 \\
\end{pmatrix} = \vec 0 $$
One expects, for example, with a sufficiently good initial guess and a nonsingular Jacobian of $\vec F$ that the Newton-Raphson iterations will converge rapidly to a solution. The Jacobian of $\vec F$ is a $3\times 3$ matrix with first degree polynomial entries:
$$ \nabla \vec F = \begin{pmatrix}
2x_1 - 2c_3 x_2 & -2c_3 x_1 + 2x_2 & 0 \\
2x_1 - 2c_2 x_3 & 0 & -2c_2 x_1 + 2x_3 \\
0 & 2x_2 - 2c_1 x_3 & -2c_1 x_2 + 2x_3
\end{pmatrix}$$
Our iterations will then take the form:
$$ \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix}
\gets \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix} -
(\nabla \vec F(x_1,x_2,x_3))^{-1} \vec F(x_1,x_2,x_3)
$$
Example of finding lengths
Let's review the constants $c_k, d_k^2$ from the original problem posted. As noted above the $c_k$ are cosines of the angles between the unit vectors:
$$ \begin{aligned}
c_1 &= v_2 \cdot v_3 &= 0.81633064 \\
c_2 &= v_1 \cdot v_3 &= 0.73827869 \\
c_3 &= v_1 \cdot v_2 &= 0.56965356
\end{aligned} $$
The constants $d_k^2$ are squared lengths of the sides of the triangle $P_1P_2P_3$:
$$ \begin{aligned}
d_1^2 &= ||P_2-P_3||^2 &= 304,386.98 \\
d_2^2 &= ||P_1-P_3||^2 &= 565,215.80 \\
d_3^2 &= ||P_1-P_2||^2 &= 869,289.07
\end{aligned} $$
The Newton-Raphson algorithm requires us to supply an initial vector ("starting guess") for the solution. In the intended application there will presumably be a previous solution expected to be close to the next frame, which addresses that need. But in this case I used a somewhat ad hoc method to choose an initial vector.
The tetrahedron has a vertex $Q$ that we picture as lying somewhere above the triangle $P_1P_2P_3$. Thus the edge lengths $x_k$ will be greater than the distances from the points $P_k$ to the centroid of that base triangle. This suggested to me taking as initial guesses a multiple of those distances greater than one, and with a little trial and error I settled on a multiple of $1.6$. NB: With the revised coordinate for $P_2$, I kept the old initial guess, in the spirit of seeing if the solution process is robust.
I implemented the Newton-Raphson iteration in a spreadsheet, making duplicate sheets to go from one step to the next. The procedure converged reasonably well in half a dozen steps:
$$ \begin{array}{c|r|r|r|r|r|r|}
\text{Step} & x_1 & x_2 & x_3 & F_1(x_1,x_2,x_3) & F_2(x_1,x_2,x_3) & F_3(x_1,x_2,x_3) \\
\hline
0 & 801.09 & 402.14 & 403.23 & -432,857.94 & -237,840.36 & -244,820.30 \\
\hline
1 & 1276.22 & 1423.32 & 1042.23 & 715,767.21 & 185,773.81 & 385,759.73 \\
\hline
2 & 1232.58 & 938.52 & 334.66 & 212,829.71 & 456,959.17 & 175,632.38 \\
\hline
3 & 1090.89 & 906.68 & 489.09 & 15,949.03 & 76,231.25 & 32,889.71 \\
\hline
4 & 1073.41 & 913.93 & 569.25 & 502.85 & 8,801.32 & 5,529.23 \\
\hline
5 & 1072.59 & 914.60 & 586.57 & 1.73 & 321.61 & 281.70 \\
\hline
6 & 1072.60 & 914.57 & 587.39 & 0.00 & 0.66 & 0.70 \\
\hline
7 & 1072.60 & 914.57 & 587.39 & 0.00 & 0.00 & 0.00 \\
\hline
\end{array} $$
Solving for Q by trilateration
Once those edge lengths are found, we have a problem of finding the intersection of three spheres. In the previous sections the unknowns were the edge lengths, but now they are "knowns", so I'd like to change our notation to make the new unknowns, the coordinates of point $Q$ more prominent.
If we relabel as radii of spheres $r_k = x_k\, (k = 1,2,3)$ the edge lengths found above, equations for our three spheres take the form:
$$ ||Q-P_1|| = r_1 \\
||Q-P_2|| = r_2 \\
||Q-P_3|| = r_3 $$
The algebra for this system of equations is a bit easier if one of the corners of the triangle $P_1P_2P_3$ is the origin. We can arrange this to be the case by subtracting, say $P_3$, from each of the other points, including the unknown point $Q$. This rigid translation preserves distances. So with unknown point:
$$ Q - P_3 = (x,y,z) $$
we label similarly the known points:
$$ P_1 - P_3 = (f_1,g_1,h_1) \\
P_2 - P_3 = (f_2,g_2,h_2) $$
Now our equations take the form:
$$ \begin{aligned}
(x-f_1)^2 + (y-g_1)^2 + (z-h_1)^2 &= r_1^2 \\
(x-x_B)^2 + (y-y_B)^2 + (z-z_B)^2 &= r_2^2 \\
x^2 + y^2 + z^2 = r_3^2
\end{aligned} $$
Subtracting each of the first two equations from the third gives a system of two linear equations:
$$ \begin{aligned}
2f_1x + 2g_1y + 2h_1z &= r_3^2 - r_1^2 + f_1^2 + g_1^2 + h_1^2 \\
2f_2x + 2g_2y + 2h_2z &= r_3^2 - r_2^2 + f_2^2 + g_2^2 + h_2^2
\end{aligned} $$
The fact that the triangle $P_1P_2P_3$ is not degenerate implies that these two planes are not parallel (nor coincident), so they intersect in a line. Putting the above linear system in reduced row echelon form gives us (using whichever variable is without a leading one) a parametric line, say:
$$ \{(t,m_1t+b_1,m_2t+b_2)\mid t\in \mathbb R \} $$
All that remains is to solve the quadratic equation for the parameter $t$:
$$ t^2 + (m_1t+b_1)^2 + (m_2t+b_2)^2 = r_3^2 $$
which provides the intersections (if any) of the line with the third sphere (centered at the origin). Plugging the appropriate value of $t$ into the parametric line and adding $P_3$ to that point gives point $Q$.
