Two solutions presented: First is an analytical derivation, the second
is a solution found by using computer software (symbolic "Maxima" and graph "TiKz") by trial and error.
1.For simplification let us call the three vertices in the base of the tetrahedron
\begin{eqnarray*}
T_1 &=& a (\sqrt{3}/3, 0, -\sqrt{6}/12) \\
T_2 &=& a (-\sqrt{3}/6, 1/2, -\sqrt{6}/12) \\
T_3 &=& a (-\sqrt{3}/6, -1/2, -\sqrt{6}/12)
\end{eqnarray*}
and the apex $a(0,0,\sqrt(6)/4)$. We choose $a=2 \sqrt{2}$ so that each vector cas norm $\sqrt{3}$.
\begin{eqnarray*}
T_1 &=& (2 \sqrt{6}/3, 0, - \sqrt{3}/3) \\
T_2 &=& (-\sqrt{6}/3, \sqrt{2}, - \sqrt{3}/3) \\
T_3 &=& a (-\sqrt{6}/3, -\sqrt{2}, -\sqrt{3}/3) \\
A &=& (0,0,\sqrt{3})
\end{eqnarray*}
We want to set up equations to find the azimuth and polar angles in spherical
coordinates. We want to make a solid rotation. Starting at the north pole $A$
we should rotate this vector as to align with one of the vectors in the cube.
The closest point to $A$ in the cube with coordinates at $\pm 1$ is
$A'= (-1,-1,1)$. So we want to make a solid rotation from $A$ to $A'$.
We find first the polar and azimuthal angles for these two points, with
the radius $r=\sqrt{3}$.
\begin{eqnarray*}
\left (
\begin{array}{c}
0 \\
0 \\
\sqrt{3}
\end{array}
\right )
=
\left (
\begin{array}{c}
\sqrt{3} \sin \phi_A \cos \theta_A \\
\sqrt{3} \sin \phi_A \sin \theta_A \\
\sqrt{3} \cos \phi_A
\end{array}
\right )
\end{eqnarray*}
From the last equation we find
\begin{equation}
\cos \phi_A = 1 \quad , \quad
\sin \phi_A = 0
\end{equation}
At this moment we can not determine the azimuthal angle $\theta_A$.
We can assume $\theta_A=0$ and this does not violate any of the equations above,
and the pair
\begin{eqnarray*}
\sin \theta_A = 0 \quad \cos \theta_A = \pm 1
\end{eqnarray*}
We choose the positive sign $\cos \theta = 1$.
Now, if we want to map this point into $(-1,-1,1)$ we need to set up the equation
\begin{eqnarray*}
\left (
\begin{array}{c}
-1 \\
-1 \\
1
\end{array}
\right )
=
\left (
\begin{array}{c}
\sqrt{3} \sin \phi_{A'} \cos \theta_{A'} \\
\sqrt{3} \sin \phi_{A'} \sin \theta_{A'} \\
\sqrt{3} \cos \phi_{A'}
\end{array}
\right )
\end{eqnarray*}
We find from the third equation,
\begin{eqnarray*}
\cos \phi_{A'}=\frac{\sqrt{3}}{3}
\quad , \quad \sin \phi_{A'} = \pm \sqrt{1 -1/3}=\pm \frac{\sqrt{6}}{3}
\end{eqnarray*}
From the first equation
\begin{eqnarray*}
-1 = \left ( \sqrt{3} \right )
\left ( \pm \frac{\sqrt{6}}{3} \right ) \cos \theta_{A'} = \pm \sqrt{2} \cos \theta_{A'}
\end{eqnarray*}
If we choose the ``$-$'' sign then $\sin \phi_{A'}$ should (because the first
component is negative) be positive. So let us pick
\begin{eqnarray*}
\cos \theta_{A'}= \frac{\sqrt{2}}{2} = \sin \theta_{A'}
\quad , \quad \sin \phi_{A'} = -\frac{\sqrt{6}}{3}
\end{eqnarray*}
We found the following convenient equations
\begin{eqnarray*}
\cos \phi_A &=& 1 \quad , \quad \sin \phi_A = 0 \\
\cos \phi_{A'} &=& \frac{\sqrt{3}}{3} \quad , \quad \sin \phi_{A'} = -\frac{\sqrt{6}}{3} \\
\cos \theta_A &=& 1 \quad , \quad \sin \theta_A = 0 \\
\cos \theta_{A'} &=& \frac{\sqrt{2}}{2} \quad , \quad \sin \theta_{A'} =
\frac{\sqrt{2}}{2} \\
\end{eqnarray*}
which we use to find the following required trigonometric equations for the rotation.
The rotation needed to go from $A$ to $(-1,-1,1)$ in the polar direction has the
two following basic trigonometric functions:
\begin{eqnarray*}
\cos (\theta_{A'}-\theta_A) &=& \cos \theta_{A'} \cos \theta_A + \sin \theta_{A'} \sin
\theta_A = \frac{\sqrt{2}}{2} + 0 = \frac{\sqrt{2}}{2} \\
\sin ( \theta_{A'}-\theta_A) &=& \sin \theta_A' \cos \theta_A - \sin \theta_A
\cos \theta_{A'} = \frac{\sqrt{2}}{2} - 0 = \frac{\sqrt{2}}{2}.
\end{eqnarray*}
We call $\theta=\theta_{A'} - \theta_A$ the total rotation polar angle between
the point $T_1$ and $(1,-1,-1)$.
Now for the azimuthal rotation.
\begin{eqnarray*}
\cos(\phi_{A'}-\phi_A) &=& \cos \phi_{A'} \cos \phi_A + \sin \phi_{A'}\sin \phi_A
= \frac{\sqrt{3}}{3}
\end{eqnarray*}
and
\begin{eqnarray*}
\sin( \phi_{A'}-\phi_A)= \sin \phi_{A'} \cos \phi_A - \sin \phi_A \cos \phi_{A'}
= -\frac{\sqrt{6}}{3} + 0
= -\frac{\sqrt{6}}{3}
\end{eqnarray*}
from which
\begin{eqnarray*}
\sin( \phi_{A'}-\phi_A)= -\frac{\sqrt{6}}{3}
\end{eqnarray*}
We call $\phi=\phi_{A'} - \phi_A$.
We are ready to make the rotations needed. The azimuthal rotation is done with respect
to the $z$ axis. This is
\begin{equation}
Az =
\left (
\begin{array}{ccc}
\cos \theta & -\sin \theta & 0 \\
\sin \theta & \cos \theta & 0 \\
0 & 0 & 1
\end{array}
\right )
=\left (
\begin{array}{ccc}
\frac{\sqrt{2}}{2} & -\frac{\sqrt{2}}{2} & 0 \\
\frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2} & 0 \\
0 & 0 & 1
\end{array}
\right )
\end{equation}
Which we identify as a $\pi/4=45^{\circ}$ rotation of the $XY$ plane with respect to the
$Z$ axis.
The polar rotation with respect to the $Y$ axis in the counter-clockwise direction is given by
\begin{eqnarray}
P = \left (
\begin{array}{ccc}
\cos \phi & 0 & \sin \phi \\
0 & 1 & 0 \\
-\sin \phi & 0 & \cos \phi
\end{array}
\right )
= \left (
\begin{array}{ccc}
\frac{\sqrt{3}}{3} & 0 & -\frac{\sqrt{6}}{3} \\
0 & 1 & 0 \\
\frac{\sqrt{6}}{3} & 0 & \frac{ \sqrt{3}}{3}
\end{array}
\right )
\end{eqnarray}
The matrices found above produce the proper rotation.
Most of this exercise here was done by trial and error.
First we want to bring all vectors to the same size ($\sqrt{3}$).
This is done by choosing $a=2 \sqrt{2}$ (the side length) .
Then we call the matrix that rotates $\pi/4$ around the $z$ axis,
$Y$ (for yaw):
\begin{eqnarray} Y = \left ( \begin{array}{ccc} \cos \alpha &
-\sin \alpha & 0 \\ \sin \alpha & \cos \alpha & 0 \\
0 & 0 & 1 \end{array} \right )
= \left ( \begin{array}{ccc} \frac{\sqrt{2}}{2} & -\frac{\sqrt{2}}{2} & 0 \\ \frac{\sqrt{2}}{2} & \frac{\sqrt{2}}{2} & 0 \\
0 & 0 & 1 \end{array} \right ) \end{eqnarray}
Then the matrix which rotates around the $y$ axis: $P$ (for pitch)
with an angle of $\theta = \arccos(\sqrt{3}/3)$ which is about
$54^{\circ}$ : This is: \begin{eqnarray} P = \left (
\begin{array}{ccc} \cos \theta & 0 & -\sin \theta \\ 0 & 1 & 0
\\ \sin \theta & 0 & \cos \theta \end{array} \right )
= \left ( \begin{array}{ccc} \frac{\sqrt{3}}{3} & 0 & -\frac{\sqrt{2}}{\sqrt{3}} \\
0 & 1 & 0 \\ \frac{\sqrt{2}}{\sqrt{3}} & 0 & \frac{\sqrt{3}}{3} \\ \end{array} \right ) \end{eqnarray}
Then we can verify by matrix multiplication that if we call the base
vectors
\begin{eqnarray} T_1 &=& a (\sqrt{3}/3, 0, -\sqrt{6}/12) \\
T_2 &=& a (-\sqrt{3}/6, 1/2, -\sqrt{6}/12) \\ T_3 &=& a
(-\sqrt{3}/6, -1/2, -\sqrt{6}/12) \end{eqnarray} Then: $ Y P T_1 =
(1,1,1)$, $YPT_2=(-1,1,-1)$, $YPT_3=(1,-1,-1)$, and finally for the
apex $A=(0,0,a \sqrt(6)/4)$, $Y P A = (-1,-1,1)$.
I used Maxima to validate my computations. I also used TiKZ to
draw and test the transformations. I did 4 plots, three of the plots
where the projections into the $XY$, $XZ$, and $YZ$ axis (because
the optical illusions from seeing a 3D figure in a 2D screen). The
other figure was a perspective in 3D which is the only one that I
include here.
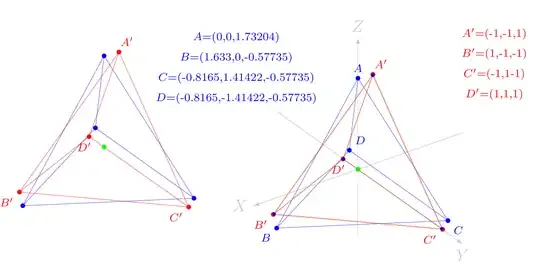
The figure on the right has the rotated (blue) into (brown) on top
of the (red) diagonals of the cube. The blue dots in the second
figure are smaller to see how the overlay is doing the job.


